Aryaman Patel
CV
Publications
Aryaman Patel
Computer Vision - Perception
Follow
Boston, MA
Email
LinkedIn
Github
Google Scholar
My Projects
Iterative closest Point
Star
Fork
Occupancy Grid from Laser Scans
Star
Fork
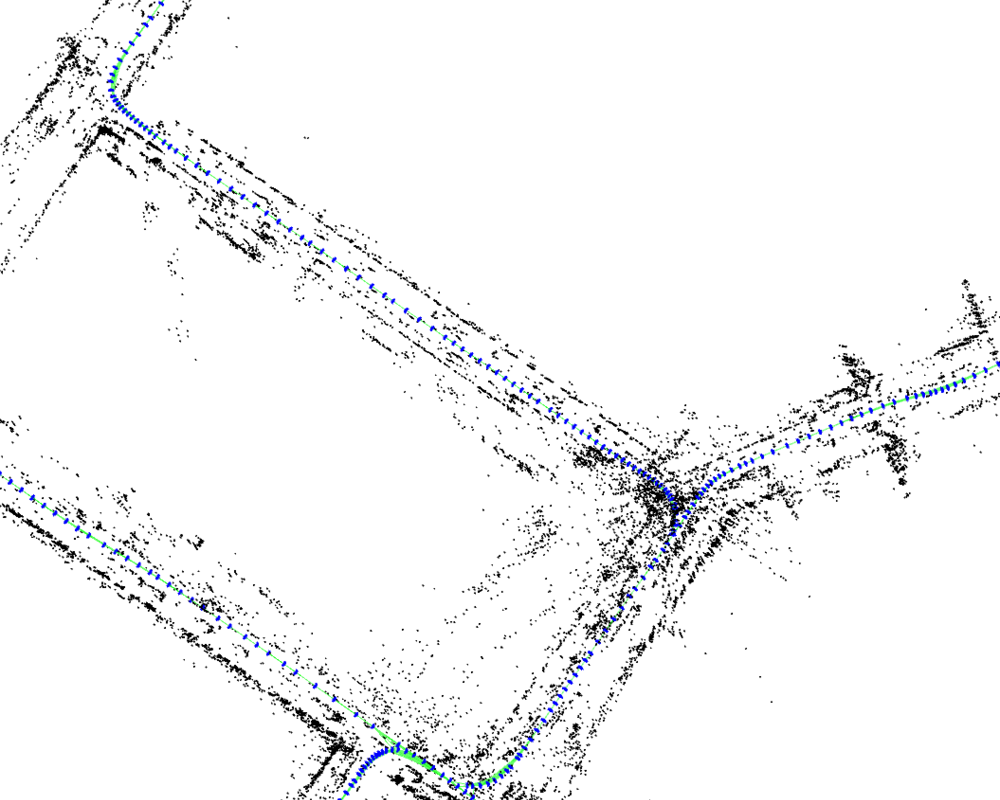
ORB SLAM3 Implementation on NUance.
Star
Fork
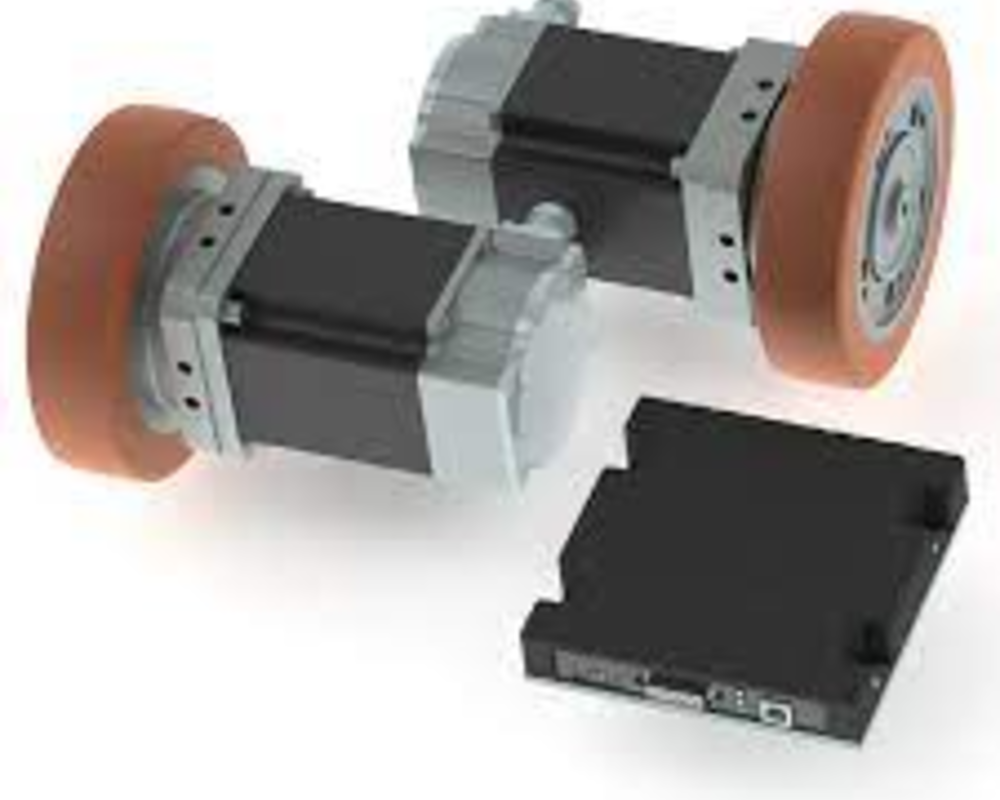
Odometry Roboteq
Star
Fork
Motion Detection
Star
Fork